Immersion System
Live event broadcasting, especially in sports and major public events, often faces challenges in delivering a truly immersive experience to viewers. Traditional methods tend to limit the viewer's perspective and can be burdened with high production costs due to the need for specialized personnel. Our lab is pioneering a broadcasting…... Read More

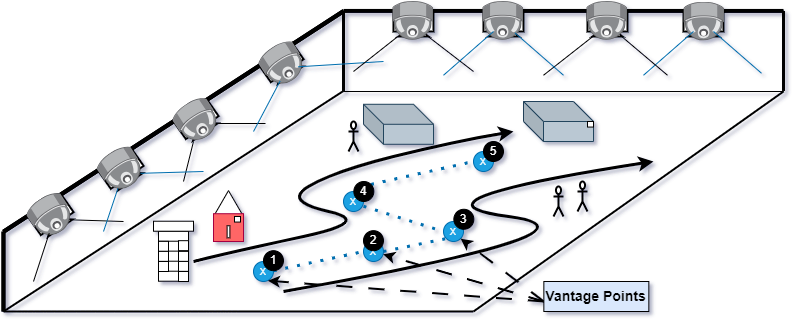
Collaborative Robotics
Human Movement Prediction through 2D Imaging: This project focuses on methods to determine and use context to predict how humans will behave when working alongside robots. This foreknowledge enables the robotic system to behave safely, prevent collisions, and better support human users. Context is derived from objects visible in the…... Read More
Surgical Robotics
Welcome to the forefront of modern medicine, where cutting-edge technology meets the precision of surgical mastery: the realm of Surgical Robotics. In an era defined by remarkable advancements, we find ourselves witnessing a revolution that seamlessly melds the ingenuity of robotics, the finesse of computer vision, and the power of…... Read More
AMoC: Adaptive Multiprocessor on-Chip
The AMoC project (Adaptive Multiprocessors-on-Chip) is funded by the Deutsche Forschungsgemeintschaft (German Research Foundation) and focuses on the design of adaptive reconfigurable chip multiprocessor systems. Read More
System-on-Chip(SoC) Security
Overview of the projects: Security has become one of the most crucial parts of System-on-chip (SoC) design because of its usage in the internet of things (IoT) devices, cyber-physical systems, and embedded computing systems. The ever-increasing complexity of on-chip components and long supply chain make SoCs vulnerable to hardware and…... Read More
Gator Reconfigurable Cloud Computing (GatorReCC)
Description Cloud computing has become a major trend for delivering services via networks. One of the reasons for its success is that it allows privates and companies to access computing and storage resources on-demand without having to care about the management of the underlying infrastructure. Major IT and Web companies…... Read More

Automatic Assessment of Infant Sleep Safety Using Semantic Segmentation
Introduction NICHD reports that close to 4,000 infants die annually from sleep-related causes in the US. Sudden Unexpected Infant Death (SUID) is the leading cause of infant mortality in the US among children aged from 1 month to 1 year old. SUID is defined as the sudden and unexpected death…... Read More
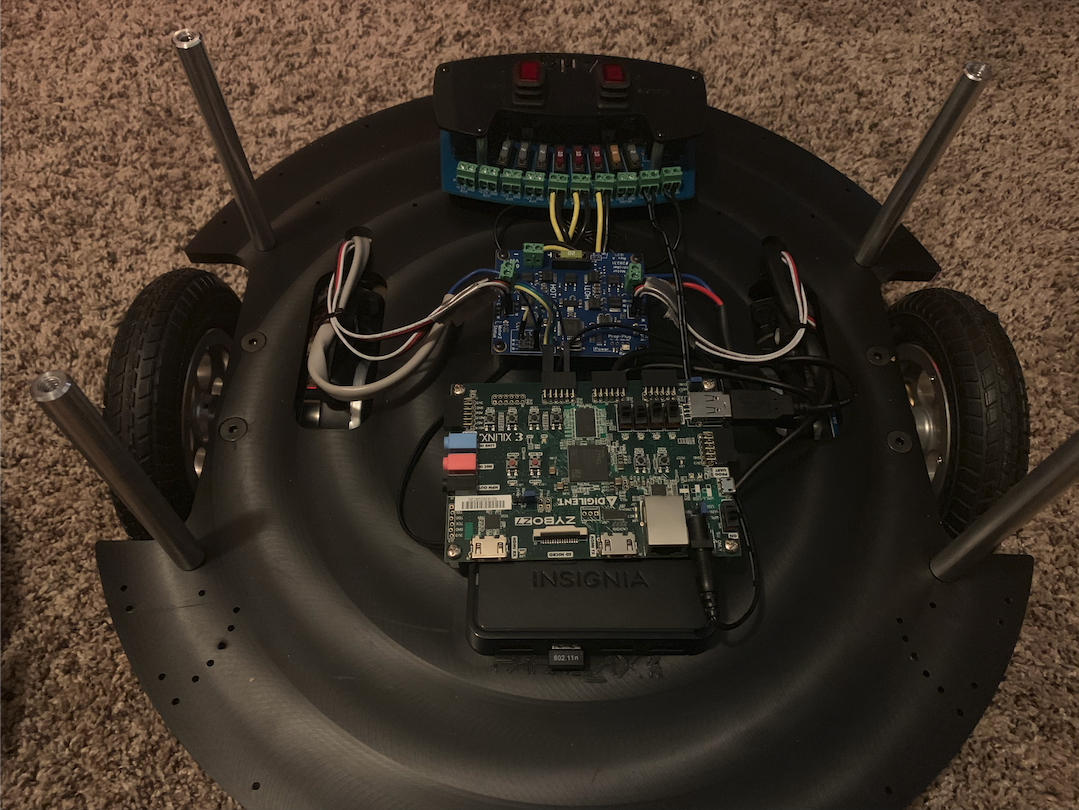
AUTONOMOUS ROBOTS
We have utilized the Arlo Complete Robotic System by Parallax as the physical framework for our research into autonomous ground vehicles. Read More
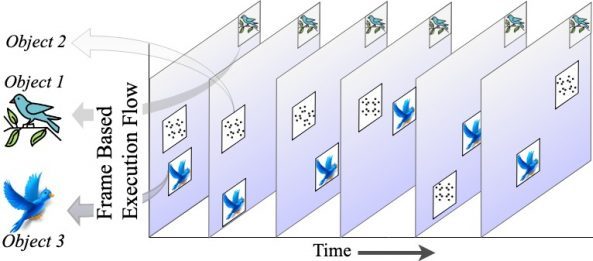
Smart Image Sensor
This project focuses on bringing the processing units close to the image sensor to introduce parallelism in the design with the help of three types of processor, namely: pixel processor, region processor, and sequential processor. Read More

ZyboCopter
We have developed a multi-copter research platform in order to further our research into unmanned systems. The project was started in order to provide a general framework with which future research may use as an unmanned aerial vehicle platform. Read More
Robotic Operating System
This page discusses the ROS nodes that are generally required to ROSify a robot. Not all of these apply to each robot, though this setup was taken from ROS wiki documentation, tutorials, and support packages for well-established robots like the Turtlebot series. Read More