Robots are senso-motoric machines used to extend human capabilities. The design of those complex systems requires skills from various fields including mechanical, electrical and computer engineering. The advent of 3D printing has increased the accessibility of complex mechanical parts, thus pushing robotics work more toward electrical/computer engineering disciplines. Companies like Boston Dynamics, Amazon and dozen more startups have demonstrated the needs and usability of autonomous robots in venues like fulfillment centers, warehouses, libraries, hospitals, airport and sport facilities, and services in general.

The design of autonomous robots is a complex undertaking that requires expertise from various field including mechanical, computer science and computer engineering, electrical engineering and more. The tasks of a roboticist include a good understanding of the design and operation of sensors as well as the challenges of the computational platforms, including hardware and software required to process and interpret the flood of environmental-related data produced by the sensors. Control, kinematics, planning and guidance of robots are equally important disciplines needed in the design of robots. Applications and trends are important factors that drive innovation and lead to the design of novel classes of robots.
Class Objectives
 In this course, we will explore topics related to designing and implementing autonomous robots. Fundamentals and key components of, as well as challenges involved in, the design and operation of autonomous robots including: robots’ parts, motion kinematics and dynamics, simulation and testing, sensor incorporation, and non-modeled environmental factors will all be explored. In group of 2 to 4, students will participate in a project with the goal of designing, building and programing an autonomous robot for the completion of a complex task.
In this course, we will explore topics related to designing and implementing autonomous robots. Fundamentals and key components of, as well as challenges involved in, the design and operation of autonomous robots including: robots’ parts, motion kinematics and dynamics, simulation and testing, sensor incorporation, and non-modeled environmental factors will all be explored. In group of 2 to 4, students will participate in a project with the goal of designing, building and programing an autonomous robot for the completion of a complex task.
Instructor
Dr. Christophe Bobda, cbobda@ece.ufl.edu,
352 294 2024
Office Hours: TBD
Join URL: TBD
Teaching Assistant/Peer Mentor/Supervised Teaching Student
Please contact through the Canvas website
- Supervise Teaching Students:
- Max Panoff(m.panoff@ufl.edu),
- Kevin DeStefano (kevindestefano@ufl.edu)
Recommended Materials
- Introduction to Autonomous Mobile Robots (Intelligent Robotics and Autonomous Agents series) second edition by Roland Siegwart, Illah Reza Nourbakhsh, Davide Scaramuzza, ISBN-13: 978-0262015356, ISBN-10: 0262015358, The MIT Press; second edition (February 18, 2011)
- Autonomous Land Vehicles, Berns, Karsten/Puttkamer, Ewald von; Steps towards Service Robots 2009. vi, 283 pp. With 246 Fig. and 4 Tab. and 16 algorithms Softc. ISBN: 978-3-8348-0421
- Introduction to Robotics: Mechanics and Control 4th Edition, John Craig, ISBN-13: 978-0133489798, Pearson; 4th edition (February 23, 2017)
Course Schedule
- Introduction, Problem Statements, Class Organization
- Robot Systems Components and Integration
- Locomotion
- Perception
- Robot Vision
- Localization
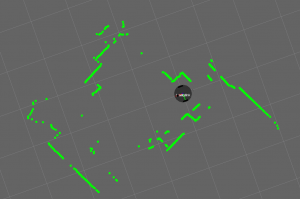
- Simultaneous Localization and Mapping (SLAM)
- Motion Planning
- Advanced Topics (Co-Bots, etc…),
- Final Project
Prerequisites
- EEL3744C- MicroP
Evaluation of Grades
- Homework will be mix of fundamental design problem and small project to practice concepts and tools presented in the class.
- Class participation is assess using random quizzes.
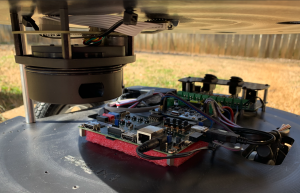
- The final project will use a off-the-shelf robots with embedded FPGA control, camera, LIDAR and ultrasound sensor. Students will use this platform to design various application, particularly navigation.
- The final project will be conducted in a group of 4-5 students. Students will designate a leader in each group who will oversee the division of work. Each student will document his contribution to the project and will be graded accordingly.
- Project work will be equally distributed among participating students. The assessment of individual students in a group project will be done according to the level of participation of each student.